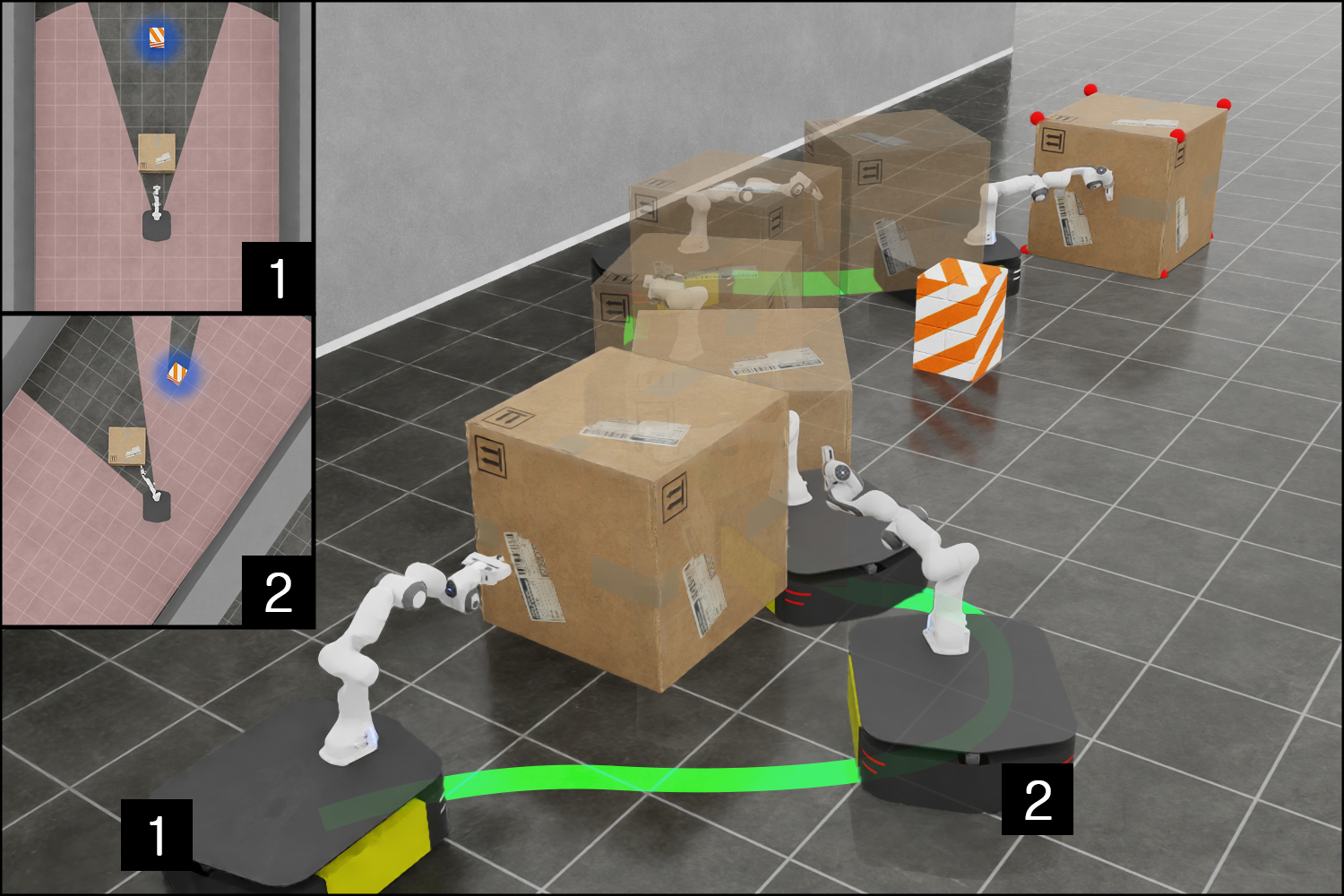
Uncertainty-Aware Non-Prehensile Manipulation with Mobile Manipulators under Object-Induced Occlusion
Jiwoo Hwang, Taegeun Yang, Jeil Jeong, Minsung Yoon, Sung-Eui Yoon
IEEE International Conference on Robotics & Automation (ICRA) 2026
A reinforcement learning framework (CURA-PPO) for safe non-prehensile manipulation using onboard sensing, addressing object-induced occlusion via uncertainty estimation.
Uncertainty-Aware Non-Prehensile Manipulation with Mobile Manipulators under Object-Induced Occlusion
Jiwoo Hwang, Taegeun Yang, Jeil Jeong, Minsung Yoon, Sung-Eui Yoon
IEEE International Conference on Robotics & Automation (ICRA) 2026
A reinforcement learning framework (CURA-PPO) for safe non-prehensile manipulation using onboard sensing, addressing object-induced occlusion via uncertainty estimation.
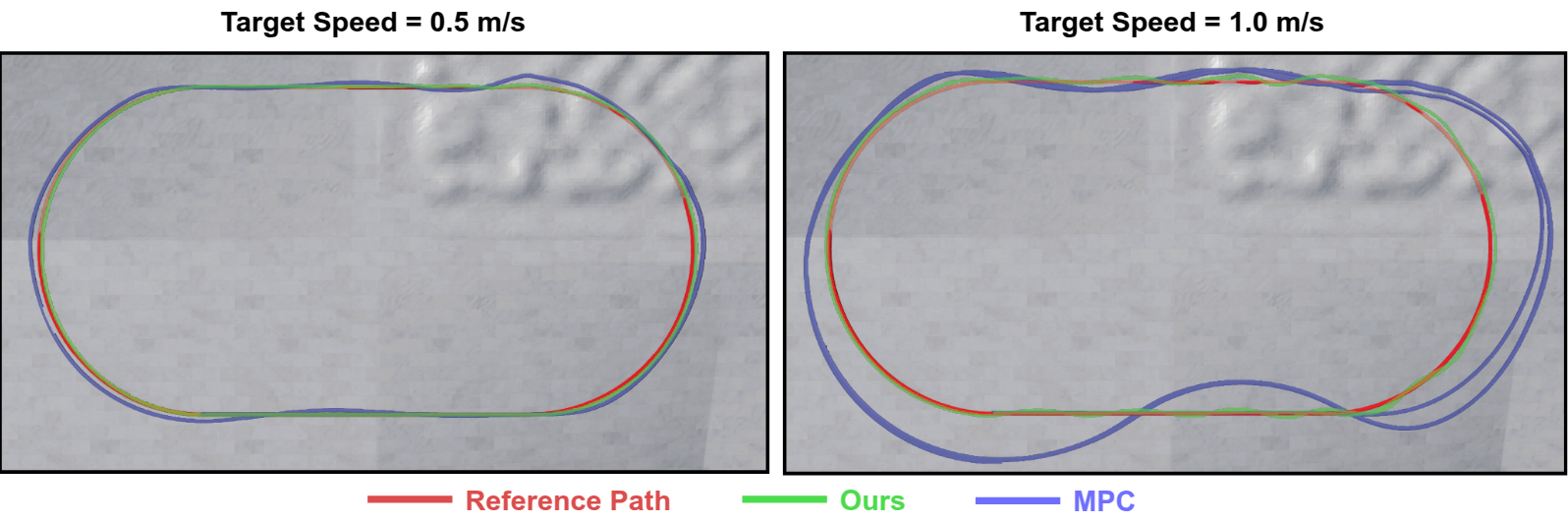
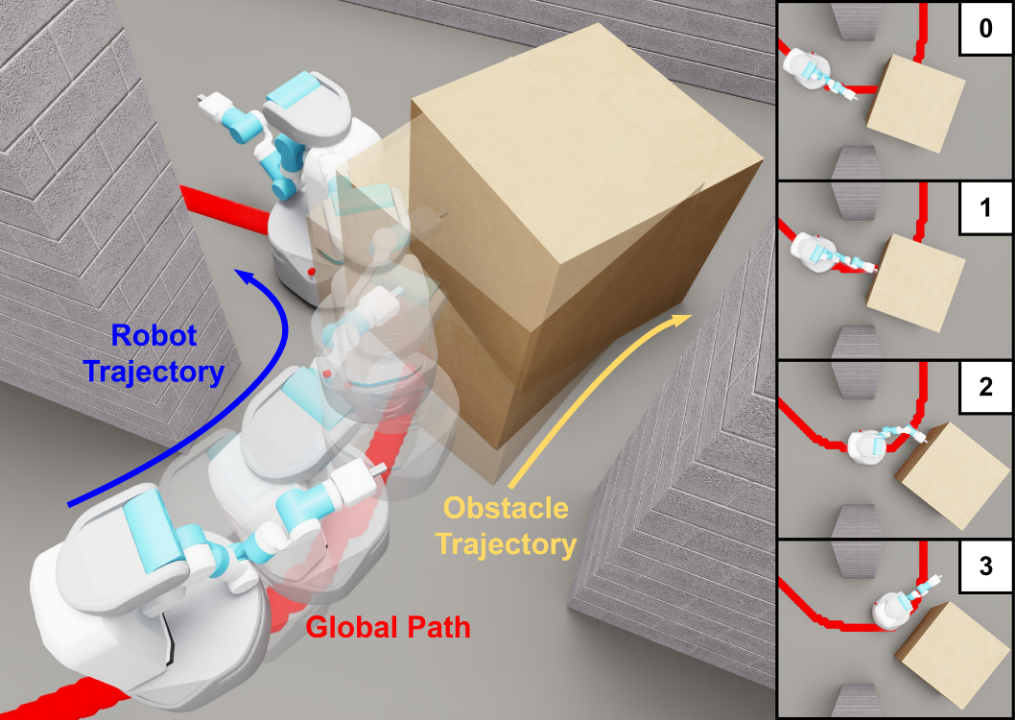
Residual Reinforcement Learning for Robust Path Following in Unstructured Terrains
Taegeun Yang, Jiwoo Hwang, Hyunsik Son, Sung-Eui Yoon
13th International Conference on Robot Intelligence Technology and Applications (RiTA) 2025
Residual Reinforcement Learning for Robust Path Following in Unstructured Terrains
Taegeun Yang, Jiwoo Hwang, Hyunsik Son, Sung-Eui Yoon
13th International Conference on Robot Intelligence Technology and Applications (RiTA) 2025