I'm currently interested in Robotics Foundation Models and Reinforcement Learning. My research goal is to contribute to building a future in which robots become an essential part of everyday life.
Action required
Problem: The current root path of this site is "baseurl ("/website") configured in _config.yml.
Solution: Please set the
baseurl in _config.yml to "Experience
-
 Samsung Research of Samsung ElectronicsRobotics Researcher02. 2026 - Present
Samsung Research of Samsung ElectronicsRobotics Researcher02. 2026 - Present
Education
-
 Korea Advanced Institute of Science and Technology (KAIST)M.S. in The Robotics Program02. 2024 - 02. 2026Advisor: Sung-Eui Yoon
Korea Advanced Institute of Science and Technology (KAIST)M.S. in The Robotics Program02. 2024 - 02. 2026Advisor: Sung-Eui Yoon -
 Kyungpook National UniversityB.S. in Mechanical Engineering / Computer Science02. 2017 - 02. 2023
Kyungpook National UniversityB.S. in Mechanical Engineering / Computer Science02. 2017 - 02. 2023
Honors & Awards
-
1st Place & Top Performer, H-Mobility Class Robotics Challenge, Hyundai Motors2023
-
Excellence Award, Competency Evaluation for ABEEK Accreditation, Kyungpook National University2022
Publications
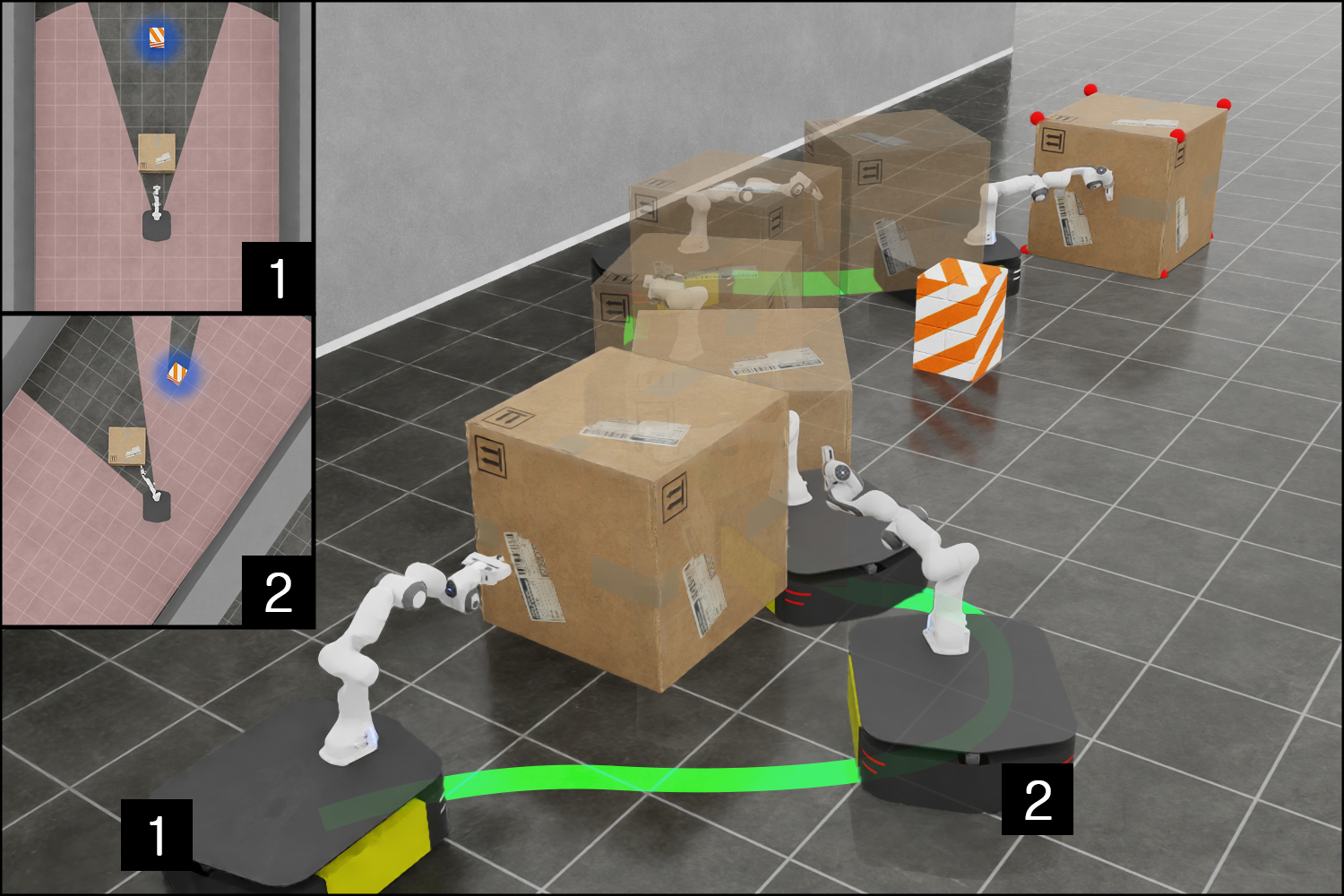
Uncertainty-Aware Non-Prehensile Manipulation with Mobile Manipulators under Object-Induced Occlusion
Jiwoo Hwang, Taegeun Yang, Jeil Jeong, Minsung Yoon, Sung-Eui Yoon
IEEE International Conference on Robotics & Automation (ICRA) 2026
A reinforcement learning framework (CURA-PPO) for safe non-prehensile manipulation using onboard sensing, addressing object-induced occlusion via uncertainty estimation.
Uncertainty-Aware Non-Prehensile Manipulation with Mobile Manipulators under Object-Induced Occlusion
Jiwoo Hwang, Taegeun Yang, Jeil Jeong, Minsung Yoon, Sung-Eui Yoon
IEEE International Conference on Robotics & Automation (ICRA) 2026
A reinforcement learning framework (CURA-PPO) for safe non-prehensile manipulation using onboard sensing, addressing object-induced occlusion via uncertainty estimation.
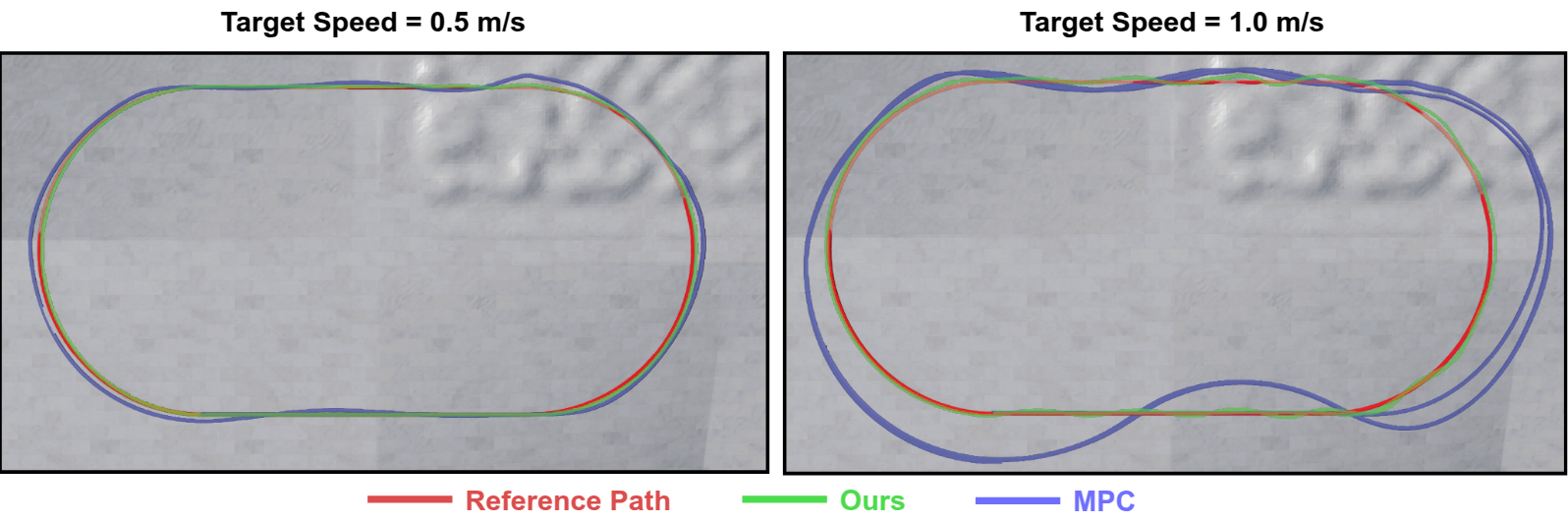
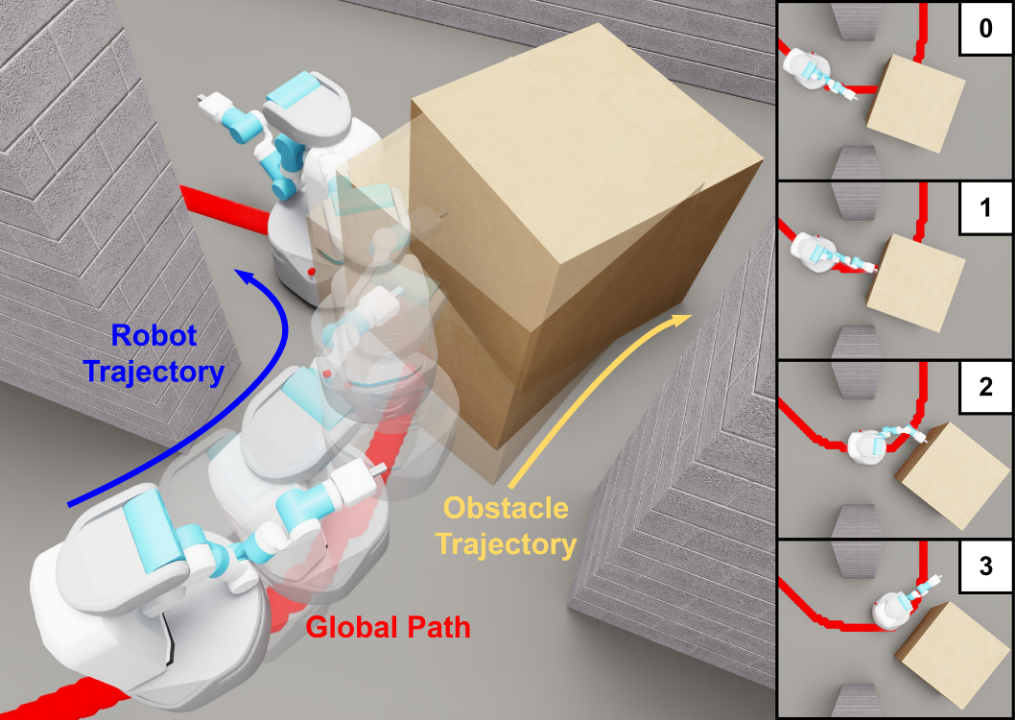
Residual Reinforcement Learning for Robust Path Following in Unstructured Terrains
Taegeun Yang, Jiwoo Hwang, Hyunsik Son, Sung-Eui Yoon
13th International Conference on Robot Intelligence Technology and Applications (RiTA) 2025
Residual Reinforcement Learning for Robust Path Following in Unstructured Terrains
Taegeun Yang, Jiwoo Hwang, Hyunsik Son, Sung-Eui Yoon
13th International Conference on Robot Intelligence Technology and Applications (RiTA) 2025